|
Analysis of Planning of Business
Planning is a vital part of any large endeavor. Many managers spend most of
their time developing and tracking plans. This section provides some basic
patterns for planning. The patterns describe individual plans as well as
protocols - standard procedures that can be used repeatedly.
Any action carried out within a domain can be recorded. The Proposed and Implemented
Action (Section 1) pattern divides the possible states of an action
into
two key sub-types, which represent the intention and what actually happens. The
end of an action is similarly divided into Completed and Abandoned Actions
(Section 2).
An abandoned action represents a final cancellation of the action, and temporary
holds on an action are represented by Suspension (Section 3).
A Plan (Section 4) is used to hold a group of proposed actions. We discuss
structures of plans that record the dependency and sequencing of a group of
actions while allowing a single action to appear in several plans. The latter
property is essential to choreographing multiple plans, which are one-off
arrangements. A Protocol (Section 5) is used for standard plans that are repeated many
times.
Carrying out an action requires resources. The Resource Allocation
(Section 6)
pattern describes protocols for proposed and implemented actions. We consider
two different kinds of resources: consumables, which are used by actions, and
assets, which are used over time.
So far our discussion of plans has focused on planning and monitoring
actions and has ignored the effects of the actions. The final pattern we discuss
handles Outcome and Start Functions (Section 7), which tie the patterns in this
section
with the observation and measurement patterns developed in
Analysis
of Clinical Observations..
These
functions allow us to say what we think an action has achieved (outcome), what
a protocol should achieve (outcome function), and what conditions make us
want to begin a protocol (start function).
Planning is a complex area, and the patterns in this section, even more than
other sections, are not intended to be complete. The patterns came out of the
Clinical Process Model, and its constructions are thus decidedly
bent in directions that support health care planning. The resource side comes
from unpublished discussions with the developers and users, and the
influence of the Common Basic Specification.
Key Concepts: Proposed Action, Implemented Action, Plan, Suspension,
Resource Allocation, Asset, Consumable, Temporal Resource,
Start Function,
Outcome Function
1. Proposed and Implemented Action
The basis of any plan consists of the fundamental actions that people take. It
is
difficult to give any more than an outline description of what makes up an
action. A plan can be coarse, consisting of large actions, or it can be
fine grained,
consisting of small actions. Actions can have a range of properties, based on
who, when, and where. With such coarse-grained properties it is difficult to
provide more than the most generic terms of party, time reference, and location,
as shown in Figure 1.
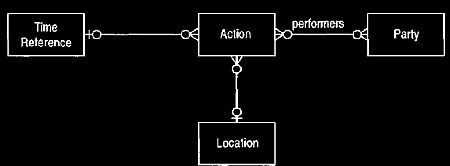
Figure 1. Properties of actions.
When making and monitoring plans, we must consider the many states
that an action can go through. It can be scheduled, resourced, peopled, started,
and completed. A state-transition diagram can record these states and how the
transitions can occur. It is difficult to make any rules about these
transitions.
Scheduling an action and resourcing it can clearly happen in any order. A
surface analysis may conclude that an action cannot be started before
resourcing and scheduling. How do we deal with actions that are started before
any formal decision is made to state a time for them? We could argue that such
actions are scheduled a moment before they are started, but this sounds more
like a management theory rationalization than a reflection
of the real business
process. Another problem arises with partial resourcing.
Any project manager will tell you that in the real world, tasks are often begun
before all the required resources are allocated. How can we reflect this
situation
in descriptions of action states?
The two important states of action are proposed and implemented actions,
as shown in Figure 2. A proposed action is purely a proposal that exists in
some plan. As such it can be scheduled by adding a time reference, resourced
by adding parties, and located with the appropriate location. These changes can
be made at any time, in any order. Once an action is begun, it is implemented.
Not only is this a change in state, but also a separate implemented action
object
is created. This allows us to record differences between plan and
implementation. By retaining the original proposed action, we can see the
differences between the plan and reality. A common difference, for example, is
the time reference; however, any attribute can change as planning documents
finally turn into actions.
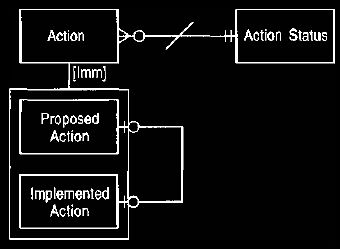
Figure 2. Basic structure of plans and actions.
Separate objects record the proposal and the implementation so that differences
can be
tracked.
Example: we decide to prepare a presentation for OOPSLA on July 1, 1997, but we
don't get
around to doing it until the 3rd. These actions can be represented
as a proposed
action
with a date of July 1 and an implemented action with a date of July 3. All other
attributes
of the proposal are the same.
We can provide a derived action state property to make it easier to tell what
state an action is in without navigating the various structures that record its
state.
This is not really necessary at this stage but becomes valuable as we consider
additional structures later.
To retain the best degree of flexibility in recording daily actions, the links
between proposed action and implemented action, as shown in Figure 2,
are optional. Often the best laid plans gather dust without implementation, and
many actions occur without any prior planning. We should resist the
temptation to rationalize last-minute plans.
Example: Doctor Jones orders a full blood count for John Smith, but the patient
does not
turn up for the test. This represents a proposed action without an
implemented
action. If
the patient is rebooked for a later date, this constitutes a new proposed
action.
Example: Doctor Cairns is called to attend a woman who is taken suddenly ill on a
train.
Here there is an implemented action but no proposed action.
2. Completed and Abandoned Actions
So far we have considered how actions are proposed and begin but not how
they might end. Clearly actions either succeed or fail. The problem is that
often
we cannot determine success or failure with any certainty, especially in health
care. Thus in this section we consider only two ending actions: completion and
abandonment. Completion occurs when the action is carried out according to
plan. Any consideration of the success or failure is left to further analysis
(see
Section 7). This definition can be too strict for domains other than health
care,
where success is more easily judged. The distinction between carrying out an
action as expected and the action achieving its goal is still valuable.
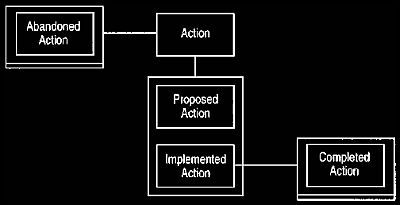
Figure 3. Completed and abandoned actions.
Abandonment is a complete and final cessation of the action. It can occur
either before or after beginning to implement the action. Abandoning a proposed
action is deciding not to begin it at all.
Example: A renal transplant provides renal function by replacing a damaged kidney
with a donated working kidney. The renal transplant action is judged a
success
if the
kidney is safely transplanted into the recipient. If the kidney is rejected
later, this does not
invalidate the success of the transplant procedure.
The transplant procedure is
still
completed; it would be abandoned only if a problem occurs during the operation.
Example: we chose to fly from London to Boston, expecting to arrive in Boston at
2:00 p.m.
The flight is delayed, so we did not arrive until 7:00 p.m.
This action was still
completed,
because we arrived in Boston that day. The delay we suffered meant that it was not
a success.
The proposed action to go
to dinner that evening, however, was abandoned.
Example: Our car would not start, and we determined the problem was a faulty
starter
motor. we thus proposed and began to replace the starter motor.
Just after
beginning we
found that the fault was actually a bad connection, and the starter motor was
fine. we thus
abandoned the action of replacing the starter
motor, although we was not unhappy
with the
result!
3.
Suspension
We can also put off actions, with the intention of continuing them later.
When this occurs a suspension is linked to the action, as shown in Figure 4.
The suspension is valid within its time period (which might be open ended). If
an action continues after the end point of the suspension, the suspension still
exists but is no longer suspending, and the action continues.
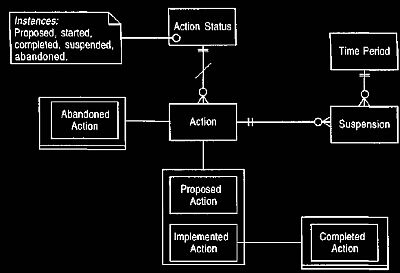
Figure 4. Suspension of actions.
A suspension is a temporary hold on an action.
Thus an action is suspended if it has currently open suspension. Both proposed
and implemented actions can be suspended; suspending a proposed action is
equivalent to postponing the start of an action.
Example: A patient is on the waiting list for a renal transplant. This is
represented by a
proposed action of renal transplant. The patient has to wait for a kidney
to
become
available. If the patient develops a cold while on the waiting list, the doctor
must place a
suspension on the patient. The transplant is not abandoned
because the patient
goes back
on the waiting list when the cold abates. The record of the suspension is
essential to
explain why the doctor did not give a suitable
kidney to the patient during that
time.
Example: we have a proposed action to wash the dishes. It is frequently suspended
for long
periods, but we never quite abandon it!
4. Plan
In its simplest sense a plan is a collection of proposed actions linked in some
sequence. A sequence can be expressed in a number of ways, but most commonly
it
is expressed as a dependency—an indication that one action cannot
begin until another completes. Plans are often described by using a dependency
diagram,
as in critical path analysis.
Figure 5 is a diagram of a dependency relationship between proposed
actions. This structure is useful when the actions are always proposed as part
of
a single plan. In many situations, however, plans interact. When a doctor sets
up
a treatment plan for a patient, actions within that treatment plan are used by
the
nurses in setting up their nursing plans. It is not unusual for many caregivers
to
have plans for a patient, and it is important that these plans be properly
choreographed. The structure shown in Figure 6 supports interaction by
allowing an action to be referenced within multiple plans and for the
dependencies to be drawn up between the references rather than between the
actions.

Figure 5. Dependencies between proposed actions.
This will only allow actions to be proposed within one plan, making it difficult
to
coordinate plans.
Example: A doctor needs a full blood count for a patient. She checks the list of
proposed
actions and finds that another doctor has already proposed a full blood
count as
part of
his plan. This is represented as the other doctor's plan having an action
reference to the
full blood count proposed action. A new plan can be created
with a new action
reference
to the same proposed action.
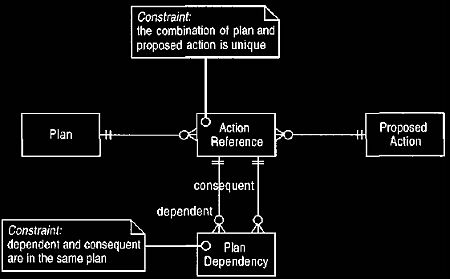
Figure 6. A plan consisting of references to proposed actions. This
structure allows actions to be referenced by several plans.
Example: we need to visit the liquor store to get some St. Emillion for a dinner
on Saturday
and Old Peculiar for a party on Sunday. The action of visiting the
liquor store
is referenced
in both the plan for preparing for the dinner and the plan for the party. The
dinner
preparation's reference has a dependency where attending
the dinner is the
consequent
and visiting the liquor store is the dependent. The party plan's reference has a
dependency where beginning the party is the consequent
and the visit to the
liquor store is
the dependent.
This notion of an action and a reference to an action within behavioral
description is a common pattern in behavioral modeling. It is analogous to the
definition of a subroutine and its call within another subroutine. The
definition
of the subroutine contains no information on how it is used within a calling
program. The calling program has no knowledge of the contents of the
subroutine.
The model in Figure 6 is a simple behavioral meta-model. A plan is a
description of intended behavior, thus a behavioral modeling technique is
appropriate. We can use any behavioral modeling technique. First we represent
the technique by its meta-model. Then we tie the actions of the meta-model to
the plan object and to the proposed actions. We should choose a behavioral
model that is sophisticated without being overly complex.
Plans are always subject to change and can be replaced by other plans, as
shown in Figure 7. The association is multivalued in both directions - as
plans change,
a single plan can be split up and replaced by separate plans, or
several plans can be consolidated into one.
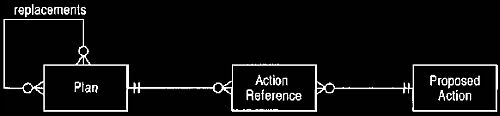
Figure 7. Replacement plans.
Example: we have a plan to buy bread at the Garden of Eden and cheese at Bread and
Circus. We replace this by a plan to get a take-away from Jae's instead.
We can consider a plan to be a sub-type of an action, as shown in Figure 8.
Thus we can propose a plan (that is, we can plan for a plan) and monitor a plan
to see if it is finished. Since planning is often quite complex, it is valuable
to be
able to schedule and track a plan's progress.
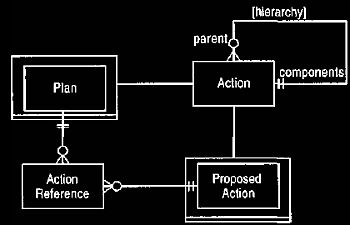
Figure 8. Plans as actions and compound actions.
We can plan to plan, and we can have complex actions without an explicit plan.
We can think of a plan as a way of aggregating actions. For example, a full
blood count can be represented as a plan, with each component measurement as
a proposed action within it. This is a very heavy-handed representation,
however. The structure shown in Figure 8 also allows an action to be
decomposed into component actions, but it allows two ways to represent actions
being part of a larger action: Using the parent-component association works
well for simple cases, and using a plan works well for more complex cases. We
can restrict the parent-component association to a hierarchy so only the
parent-component association is used for simple cases.
5. Protocol
An organization's standard operating procedures are common actions carried out
many times in much the same way each time. We can describe these common
actions, referred to here as protocols, using constructs similar to those we
used
for plans, as shown in Figure 9. Planning patterns, like other patterns in
this
book, can be divided into knowledge and operational levels. The operational
levels describe the day-to-day plans and actions. At the knowledge level are
protocols, which describe the standard procedures that guide the operational
level.
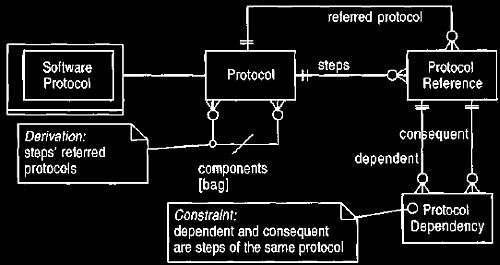
Figure 9. Structure for protocols.
It is a similar structure as the one for plans - a simple behavioral meta-model.
There are some interesting differences between the knowledge and operational
levels in the structure. Using a hierarchic structure is much less useful at
the knowledge level. Protocol can be referenced by many other protocols; it is
hard to think of a case where restricting it would be useful. We can often
effectively represent an action as part of another action in cases where we want
to aggregate actions in a regular manner, such as the measurement as part of a
full blood count.
There is no difference at the knowledge level between proposed and
implemented actions, nor is there a valuable distinction between a plan and
another group of actions. The components of a protocol are always a bag (since
a protocol can be performed more than once within another), but the proposed
actions of a plan always form a set (since you cannot do the same action twice,
but you can have two actions with the same protocol).
A protocol need not be detailed with components. A protocol can be merely
a name. It can be descriptions, textbook pages, Web pages, even a video of
someone performing a particularly tricky surgical procedure. Protocol references
can just describe components without any dependencies. Some protocols can be
entirely coded into a computer, in which case they become a piece of software.
(A software protocol is a protocol that is coded in software, not a protocol in
the
sense of a communications protocol.)
We can form actions from a complex protocol in two ways. The simplest
way is to use the parent-component association. This technique works well
when the component actions all take place in a well-bounded time period, and
no one wants to share the component actions. We first create a proposed action
for the whole protocol and only indicate the component actions if we have to
specify particular properties, such as timing or resources. (If there are a lot
of
these particular properties, then we should use a plan.) If all actions are done
by
the same party at about the same time, the parent action is enough. A
component action is created for each component protocol's reference; that is, a
protocol carried out three times within a parent protocol would yield three
component actions; any dependencies would exist exactly as in the protocol.
A plan offers greater flexibility and precision of tracking and thus is
preferred when we want to monitor when and how individual protocol steps are
carried out. These relationships are shown in Figure 10. In addition, a plan
allows the component proposed actions to be picked up and shared with other
plans. An important feature of plans is that, while they can copy the
dependencies of the protocol, plans can also define new dependencies that
might ignore that of the protocol. This ability is important in skilled
professions
such as health care, where we often have to override protocols to take into
account the needs of individual patients. Frequently we need one-off plans,
which are based on protocols but are not faithful copies.
Forming actions from a protocol will typically use plans at higher levels of
the protocol, and use the parent-component association at lower levels.
5.1 Plans and Protocols as Graphs
We can also represent a plan as a directed acyclic graph (DAG) of proposed
actions. The arcs on the graph correspond to the dependency relationships on the
action references. Each plan has its own separate graph structure. We can
represent this compactly as shown in Figure 11. This is, in essence, another
association pattern.
To apply this notion to a protocol, however, we do not form a DAG of the
subsidiary protocols. Instead we form a DAG of the protocol references, as
shown in Figure 12, because one protocol can appear as more than one step
in another parent protocol. This is specifically not the case for a plan due to
the
uniqueness constraint shown in Figure 6.
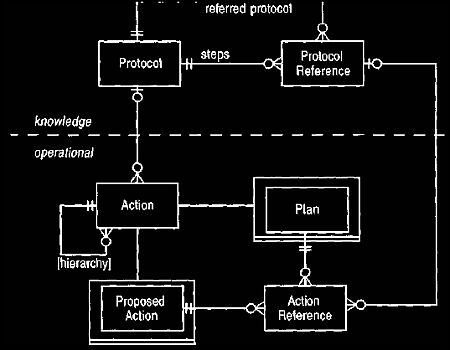
Figure 10. Relationships among action, plan, and protocol.

Figure 11. Plan as a directed acyclic graph of proposed actions.
The base form for a DAG association
pattern thus includes the dependency types (with the constraint) together with
the
fact that the element in the
DAG can only appear as one node in a DAG.
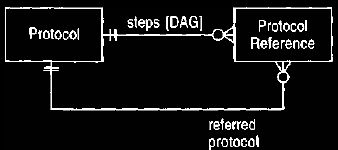
Figure 12. Protocol using a DAG.
If we use a graph for the plan structure we lose the ability to build the
association between the plan reference and the protocol reference that is shown
in
Figure 10. Naturally we could still have the DAG version as a derived mapping;
the derivation would include how to derive the graph's arcs.
6. Resource Allocation
The second major part of planning is allocating resources. A primary difference
between proposed and implemented actions lies in how they use resources. An
implemented action will actually use resources allocated to it. A proposed
action
will book some resources. Figure 13 shows resource allocation as a quantity of
some resource type. Resources can only be booked by one action and used by
one action.
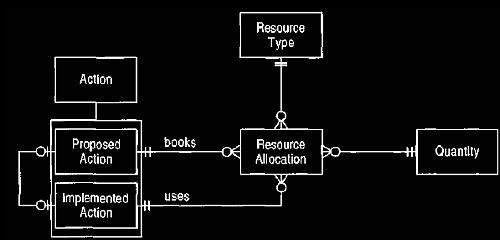
Figure 13. Action's use of resources.
Proposed actions book resources, and implemented actions use resources.
There are various kinds of resources. The first and most obvious is a
consumable. Consumables are such things as drugs, needles, and raw materials.
Consumables can be used only once and are used up by the action that uses them.
Typically consumables are asked for by quantity.
Example: A resource allocation of 10 gallons of orange juice has a quantity of 10
gallons
and resource type of orange juice.
Example: For a particular hip replacement operation, four units of packed red
cells (blood)
are booked, but only two are used. This can be represented
by two resource
allocations of
the resource type packed red cells. One is linked to the proposed hip
replacement with
quantity four units; the other is linked to the implemented hip replacement with
quantity
two units.
Some resources are not consumed, such as equipment, rooms, and people.
In no sense is a person consumed by an action (although after writing this book
I wonder). However, we can say that a person's time is used up. In this case the
resource type is the person, and the quantity is time. Thus our spending five
hours on an action is a resource allocation of five hours of us.
This is somewhat too individual a view of resource types. Resource types,
which lie at the knowledge level, more typically indicate a kind of thing rather
than the thing itself. Projects that we work on demand five hours of an
experienced OO modeler rather than us in particular. Although some people are
sufficiently singular to be resource types in their own right, most of us
mortals
are merely one of many.
In planning, therefore, the requirement is stated as "We need five hours of an
OO modeler." At some stage in the planning process, this is resolved by
booking five hours of us, a specific instance of the resource type. This implies
two levels of resource allocation: a general one where only the type is
specified
and a specific allocation where the individual is specified.
In Figure 14 the individual is referred to as an asset. Assets are classified by
asset type, which is just a kind of resource type.
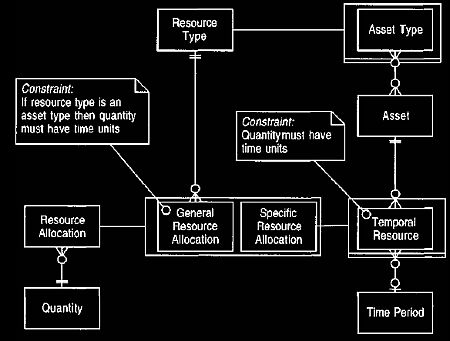
Figure 14 Resource allocations for assets.
Specific allocations name the individual asset used or booked. General
allocations only
specify the type of asset.
The difference
between a specific resource type and a general resource type is that the former
links to the asset and the latter to a resource type,
which for an asset would
be an
asset type. A temporal resource is a specific resource allocation of an asset.
It can
have not just an amount of time
but also a specific time period. This period can
be derived from the action that books or uses the temporal resource, or it can
be
separate.
Example: A modeling meeting is scheduled to be held in a small conference room
for a
couple of hours. Initially this is represented as a proposed action
that books a
general
resource allocation. The resource type of the general resource allocation is the
asset type
small conference room. The quantity of the
general resource allocation is two
hours. At
some later point the actual conference room is booked as Q9. This reclassifies
(or replaces)
the general resource allocation to a temporal resource of two hours of the asset
Q9. If the
proposed action of the meeting is booked between 2:00 and 5:00 p.m.
on Tuesday,
then
that time period is the derived time period of the allocation of Q9. If the last
hour of the
meeting is to be held in the pub, then a time period of
2:00 to 4:00 p.m. on
Tuesday is
linked to the temporal resource.
The asset is allowed to have several asset types. This multiple classification
of assets is important to represent those assets that can do several things,
although not necessarily at once.
Example: If the conference room Q9 has projection facilities, it can be
classified as both a
small conference room and a presentation room.
It cannot be booked as both at
the same
time by separate actions.
Specific resource allocation is less important for consumables. For example,
it is usually enough to say that 10 gallons of orange juice were booked and used
by an action without being more specific about which 10 gallons. With assets we
usually need to be specific because there is a greater likelihood for contention
between parties about use of assets.
At this point it is worth considering whether the relationships from sub-types
of the action shown in Figure 13 should be specialized. For example, it may be
reasonable to say that implemented actions can only use specific resource
allocations of assets. Assuming that this is something that is required (and I'm
not sure that it is in general), there are several ways of doing it. This brings
up a
good example of how a business rule can be modeled in different ways.
The first, and most obvious, way is to introduce a structural constraint. In
this case we can use a rule such as "Implemented actions cannot use general
resource allocations whose resource type is an asset type." This eager checking
is an aggressive way to enforce the business rule. It says that you are not
allowed to record a situation that violates the policy.
This can be too strong a way to do things, however. Sometimes it makes
sense to allow a situation that violates the policy to be recorded, and to have
a
separate checking phase later. This lazy checking can be done by having
some operation on implemented action (such as isConsistentQ) and having
that operation return true if the business rule is followed. This provides
greater
flexibility in handling situations where a full constraint might not be
available
from the beginning. The incomplete information is recorded, and a means for
checking it is provided.
The great advantage of lazy checking is that it separates the resolution of the
problem from the recording of the information. People recording the information
can make their best attempt at the time, and then either they or a more
qualified
person can clear things up later. If matters can be resolved easily at the point
of
information capture, then eager checking is better.
Whether to allow general resource allocation of assets to implemented
actions depends on the specific problem. If the needs of the domain are
satisfied
by knowing that it took two hours of an OO modeler without knowing which
one, then general allocation of asset types should be allowed. This question may
be dependent on the asset type. For example, hospital policy may dictate that
all
implemented allocations of consultants must be specific, although orderlies may
be allocated generally.
We can use specific resource allocation with consumables if we are concerned
with removing the consumable from some finite store that we have to
track. In such cases we want to say that the consumable is taken from a
particular holding of that consumable, as shown in Figure 15.
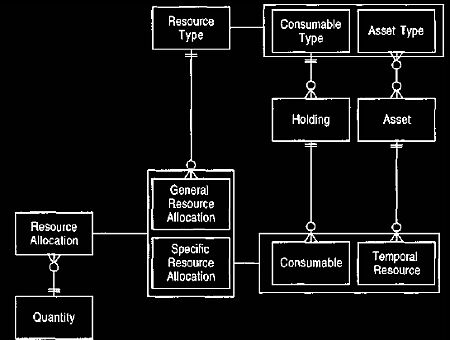
Figure 15 Allowing specific allocations of consumables.
Holdings can be
organized in various ways, depending on the resource tracking process, which we
are not considering here. However, it is worth saying that
a holding can be seen
as an account and a resource allocation as an entry, following the approach
described in
Analysis of Accounting>, Section 14.
Resource allocations can also be used by protocols to describe the resources
needed for a protocol to be carried out. In this case we use general resource
allocations.
Example: To make chapati (Indian bread) you need V4 cup of flour, V8 cup of
water, V4
tablespoon of oil, and a pinch of salt. This can be represented as
four general
resource
allocations.
7. Outcome and Start Functions
In this section we use concepts developed in section 3 to consider reasons why
we form a plan and how we can gauge its success.
Plans are initiated by observations, which, of course, can be hypotheses or
projections. Similarly their outcomes are observations linked to the actions
within
the plan, as shown in Figure 16. Like many aspects of observation, the
outcome link is dependent on the eyes of the performer. Thus some parties may
not see
an observation as the outcome of an action while others would. We
would record this situation by having more than one observation by different
performers.
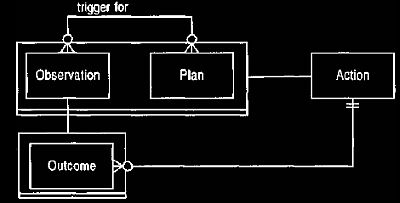
Figure 16. Links between observation, plan, and action.
Example: John Smith came to his doctor with the classic symptoms of diabetes:
weight
loss, thirst, and polyuria. The doctor creates a plan triggered by these
observations. The
plan includes a proposed action to carry out a blood glucose measurement.
Example: After experiencing poor sales, a company decides to improve the sales
force's
commission and to cut prices. Some analysts might say that the
improved sales
were the outcome of the increase in commission, others might say the improvement
was
the outcome of the cut in prices. Separate observations
would be made by each
group,
with links to different actions.
Note that observations are a sub-type of actions. They can be scheduled,
timed, have performers, and be parts of plans. Their additional behavior is that
they identify an observation concept or measure a phenomenon type.
A similar set of linkages appears at the knowledge level using start functions
and outcome functions, as shown in Figure 17. A start function contains
information on conditions that are likely to trigger the use of a protocol.
Following the example of associative functions, the model records the
observation concepts
and protocols used as arguments to the start function but
does
not specify how they are combined. The intention is for different kinds of start
functions to have
different methods for combining them.
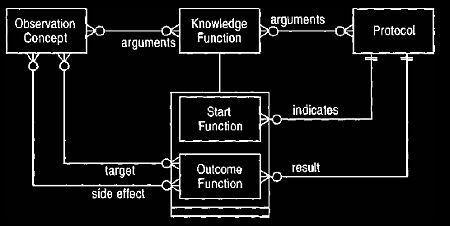
Figure 17. The use of start and outcome functions at the knowledge level.
Start functions indicate the conditions for beginning an action, and outcome
functions indicate the targets and side effects.
Example: The protocol add oil is indicated by a start function with an argument
of low oil
level.
Example: Beta-blockers are a treatment for hypertension and angina but should not
be
used if the patient has asthma. This leads to three start functions,
all of
which indicate
beta-blocker treatment. (Beta-blocker treatment is a protocol with a resource
allocation
of the resource type beta-blocker.)
Two start functions, one with the argument
hypertension and one with the argument angina, have a simple body with no
processing, which is a straightforward
indication. The third has the argument
asthma
and is a body of logical negation. (We could have a centra-indication sub-type of
start
function, but it all
really depends on the way the arguments are processed.)
Outcome functions operate similarly. Again the input is a combination of
protocols and observation concepts. The result is two sets of observation
concepts. Some observation concepts represent the target use of the protocol,
that is, the effects that represent the purpose of the protocol.
The other
observation concepts are the side effects. A protocol can have many results.
This may
reflect other protocols or observation concepts that
the patient might have at
that time. These are introduced as arguments inherited from the knowledge
function.
Example: Decreasing prices have an outcome function with a target of increased
market
share and a side effect of reduced revenue per unit sold.
Example: The protocol liver transplant has an outcome function with a target of
good liver
function and side effects of organ rejection and
biliary stricture (narrowing of
the bowel
duct). The start function can also include information on the likelihoods of
these
conditions arising.
Separate outcome functions might exist with the same target
and side
effects but with arguments representing diseases that affect the procedure.
These
separate outcome functions indicate different likelihoods for the target and
side effects
due to presence of the disease arguments.
|